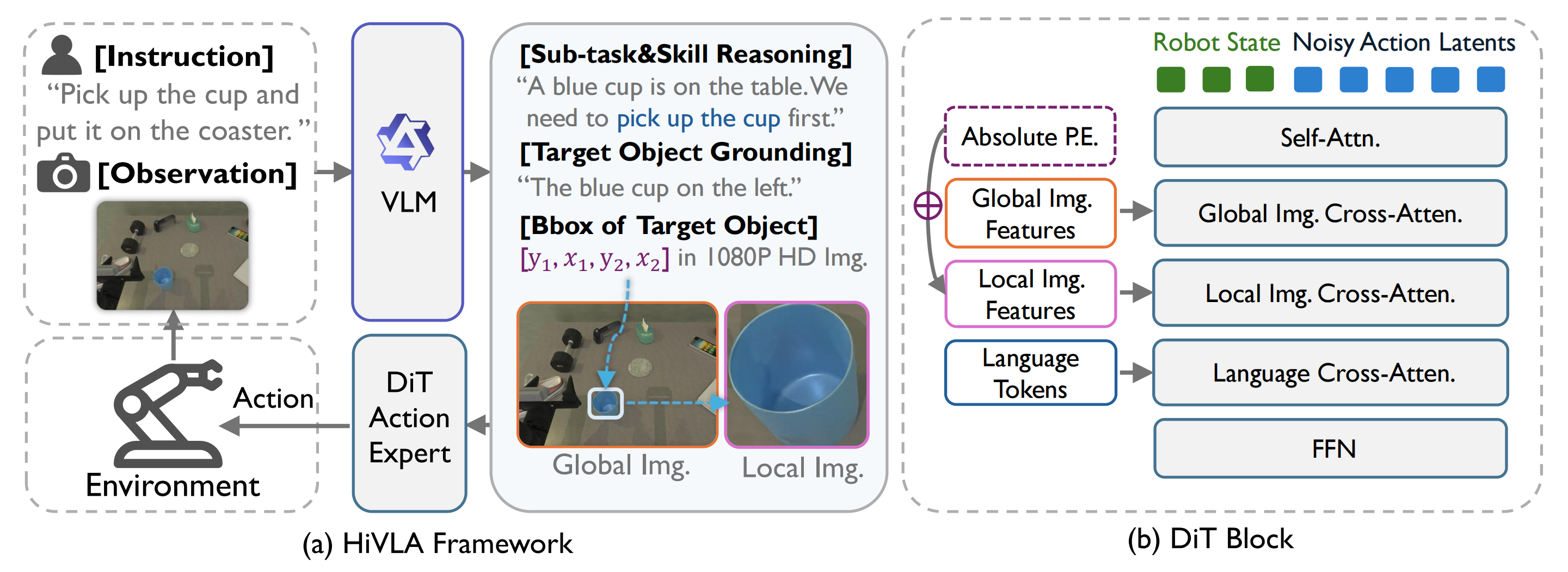
While end-to-end Vision-Language-Action (VLA) models offer a promising paradigm for robotic manipulation, fine-tuning them on narrow control data often compromises the profound reasoning capabilities inherited from their base Vision-Language Models (VLMs). To resolve this fundamental trade-off, we propose HiVLA, a visual-grounded-centric hierarchical framework that explicitly decouples high-level semantic planning from low-level motor control. In high-level part, a VLM planner first performs task decomposition and visual grounding to generate structured plans, comprising a subtask instruction and a precise target bounding box. Then, to translate this plan into physical actions, we introduce a flow-matching Diffusion Transformer (DiT) action expert in low-level part equipped with a novel cascaded cross-attention mechanism. This design sequentially fuses global context, high-resolution object-centric crops and skill semantics, enabling the DiT to focus purely on robust execution. Our decoupled architecture preserves the VLM's zero-shot reasoning while allowing independent improvement of both components. Extensive experiments in simulation and the real world demonstrate that HiVLA significantly outperforms state-of-the-art end-to-end baselines, particularly excelling in long-horizon skill composition and the fine-grained manipulation of small objects in cluttered scenes.
| Task | π0 | π0.5 | StarVLA | H-RDT | Oursw/o Skill | Ours |
|---|---|---|---|---|---|---|
| Easy Tasks | ||||||
| Click Bell | 45% | 65% | 71% | 88% | 95% | 94% |
| Click Clock | 53% | 66% | 83% | 93% | 97% | 97% |
| Press Stapler | 60% | 69% | 63% | 89% | 98% | 97% |
| Lift Pot | 59% | 21% | 18% | 92% | 96% | 96% |
| Average | 54.3% | 55.3% | 58.8% | 90.5% | 96.5% | 96.0% |
| Hard Tasks | ||||||
| Place Shoe | 75% | 68% | 61% | 88% | 94% | 95% |
| Move Stapler | 15% | 17% | 15% | 34% | 42% | 60% |
| Stamp Seal | 61% | 42% | 25% | 43% | 68% | 76% |
| Stack 3 Blocks | 1% | 1% | 16% | 20% | 26% | 37% |
| Click 3 Bells | 41% | 54% | 66% | 88% | 92% | 98% |
| Average | 38.6% | 36.4% | 36.6% | 54.6% | 64.4% | 73.2% |
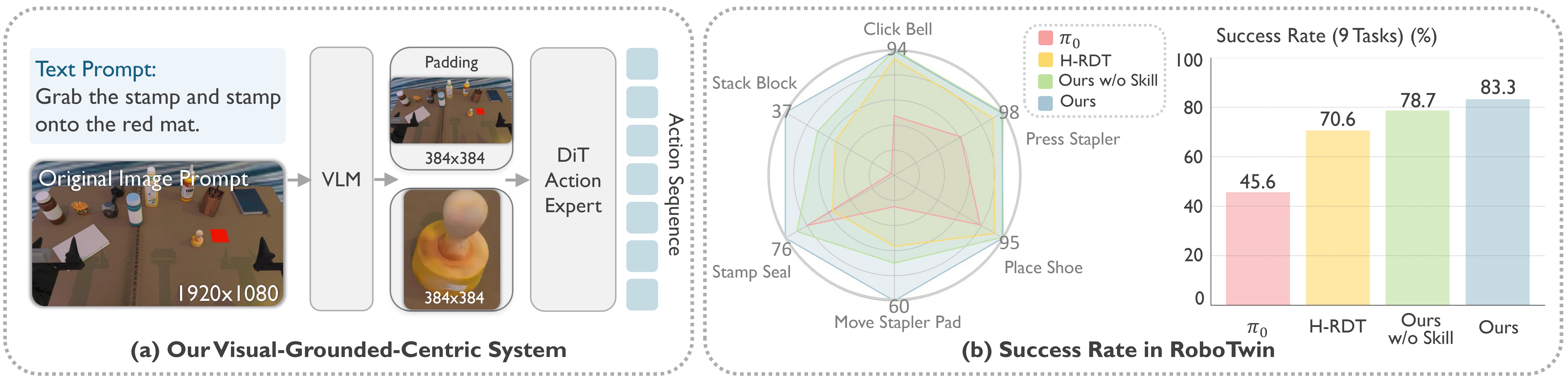
| Total Average | 45.6% | 44.8% | 46.4% | 70.6% | 78.7% | 83.3% |
Main success rates across 9 tasks in the RoboTwin simulator. HiVLA demonstrates superior performance, particularly in long-horizon and visually demanding tasks. Best and second-best results are bold and underlined.
@article{yang2026hivla,
title = {{HiVLA}: A Visual-Grounded-Centric Hierarchical Embodied Manipulation System},
author = {Yang, Tianshuo and Chen, Guanyu and Chen, Yutian and Liang, Zhixuan and Liu, Yitian and Chen, Zanxin and Xu, Chunpu and Liang, Haotian and Pang, Jiangmiao and Mu, Yao and Luo, Ping},
journal = {arXiv preprint arXiv:2604.14125},
year = {2026}
}